功能说明
机器人通过拖拽示教,生成一条预设的路径,创建完毕,机器人可沿路径运动
使用方法
第一步
1.点击模型库,选择ER700机器人。

第二步
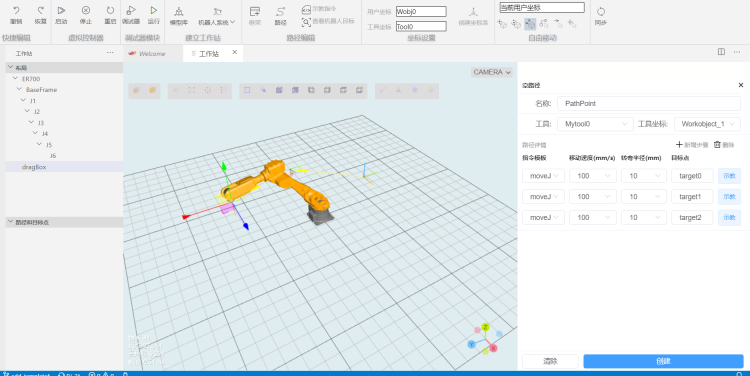
2.点击路径,选择空路径:
2.1 点击新增步骤,选取预期的点位数量。
2.2 点击第一个示教点,机器人法兰出现一个示教点。
2.3 选择自由移动的拖拽,拖动法兰,选取其他点示教。
2.4 点击删除按钮,删除最后一条路径。
2.5 点击清除按钮,清空所有路径。
2.6 改变已经示教的点位:点击左侧栏的dragBox,拖动法兰,点击除第一个的示教点,改变已经示教的点位
2.7 点击创建,在左侧栏生成空路径
第三步
3.连接虚拟控制器
点击菜单栏机器人系统,连接虚拟控制器
第四步
4.机器人沿空路径运动:
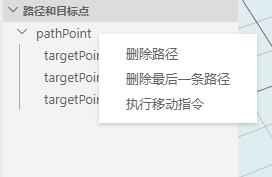
4.1 右键点击父节点,执行移动指令按钮, 机器人沿着路径运动
4.2 右键点击父节点,删除路径按钮,删除全部路径
4.3 右键点击父节点,删除最后一条路径按钮,删除最后一条路径按钮