功能说明
沿着几何体边缘规划生成一条路径,创建完毕后,机器人可沿着创建的路径运动。
使用方法
第一步
创建机器人
点击菜单栏的 模型库 选择 ER700 机器人 如图:

选择好后会生成一个机器人在画布上
第二步
创建几何体
同样点击菜单栏的 模型库 选择 矩形体 ,会在画布中生成一个几何体,此时会在IDE右侧出现编辑面板,可编辑调整几何体 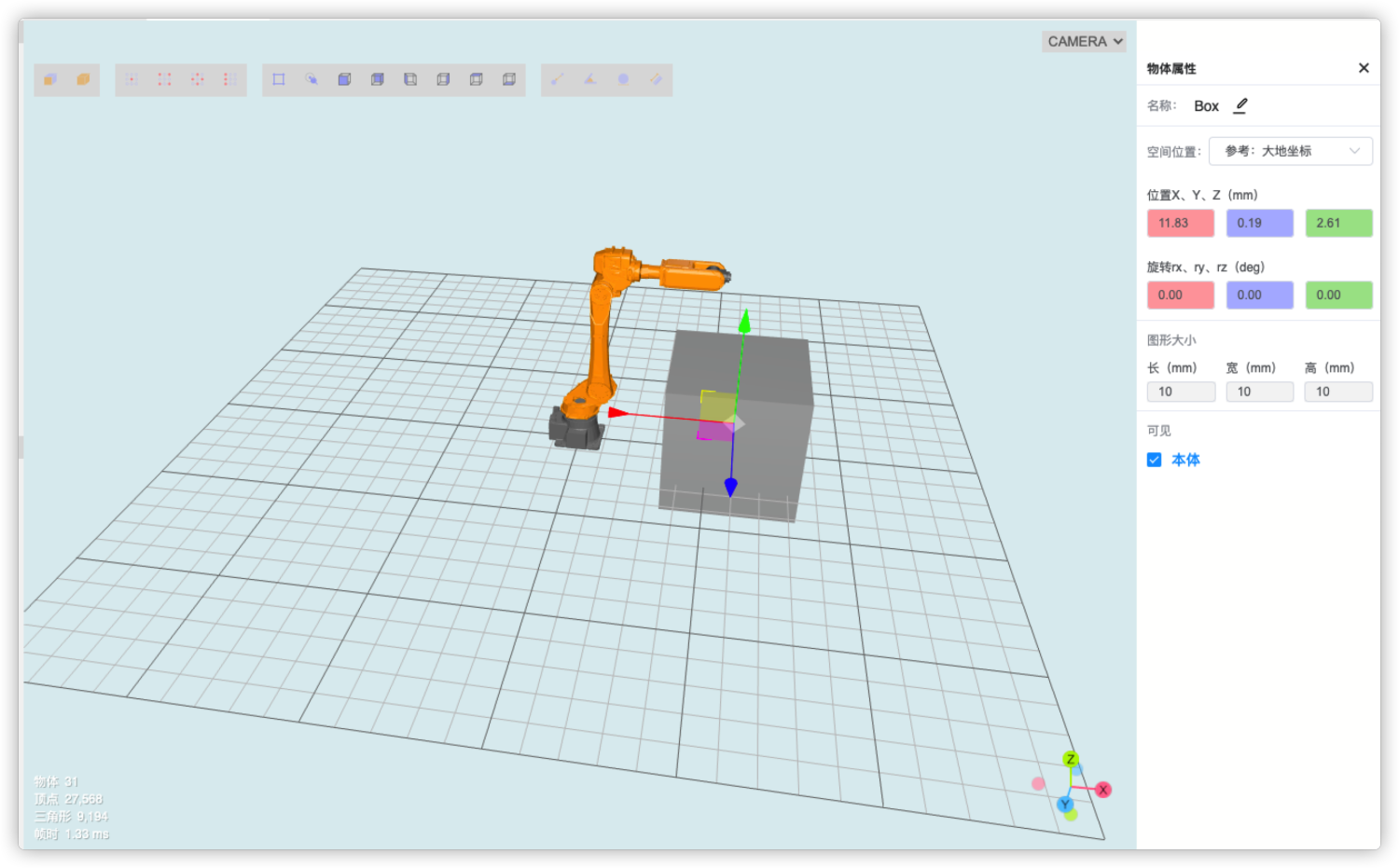
第三步
启动自动路径
点击菜单栏的 路径 选择 自动路径,会启用自动路径功能,此时会自动选中选择面和选择边缘点,并出现右侧面板。
tips: 面板关闭后,自动路径也会自动关闭
如图: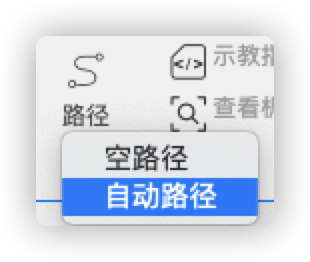
第四步
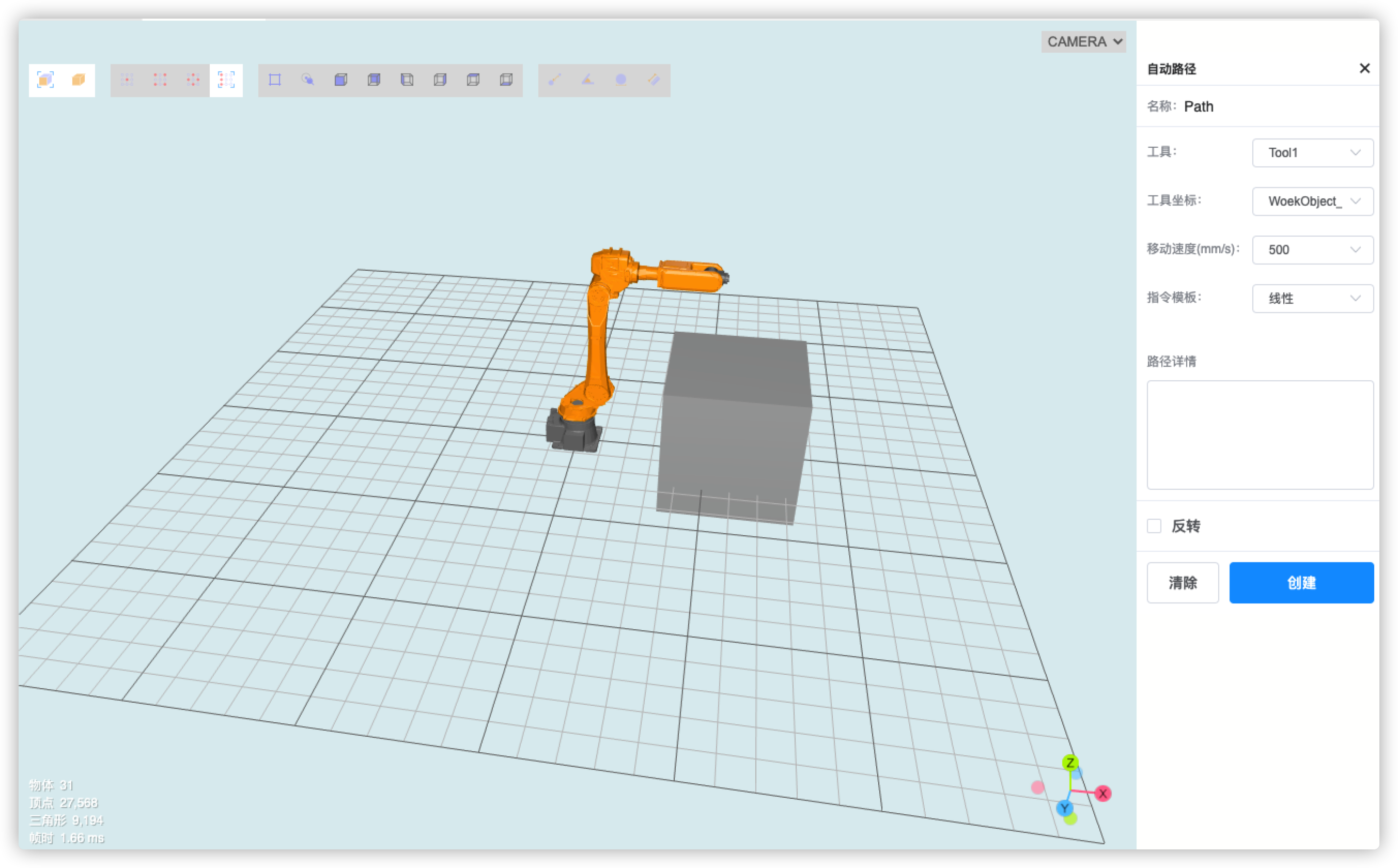
生成轨迹路径
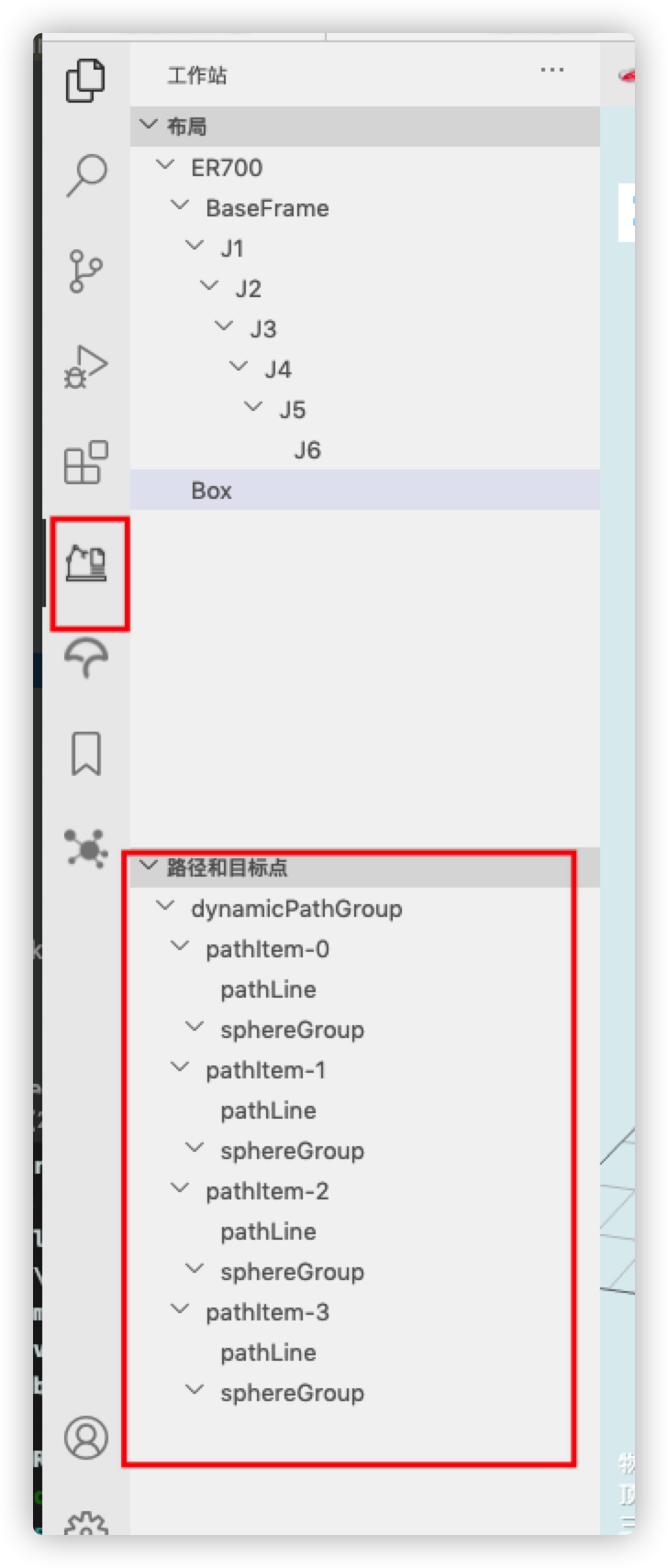
只需要将鼠标放置到几何体面上,就会自动生成轨迹,若创建完毕后,则可以在右侧点击创建,并会在左侧栏生成路径树。 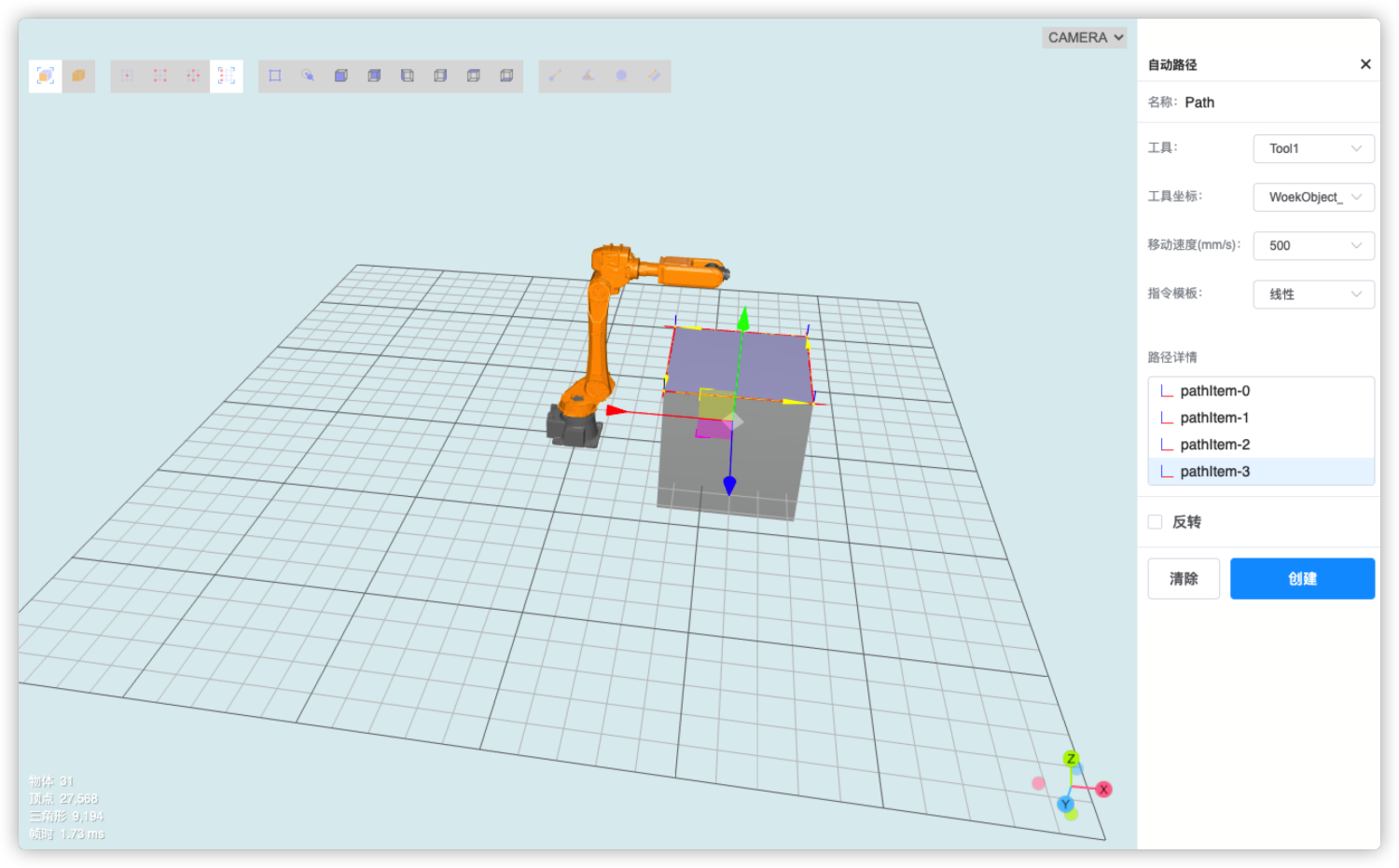
第五步
连接虚拟控制器
点击菜单栏机器人系统,连接虚拟控制器 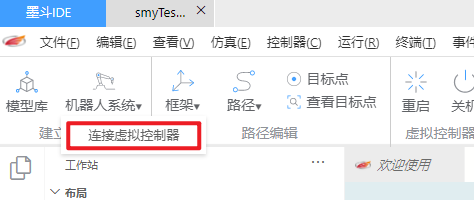
第六步
沿着路径运动
右键 路径和目标点 下的一个路径,会出现菜单,点击执行运动指令即可让机器人沿着路径运动。 